ROBOTIC WOODCRAFT
INTERDISCIPLINARY RESERACH PROJECT IN COOPERATION WITH
More information here: www.roboticwoodcraft.com
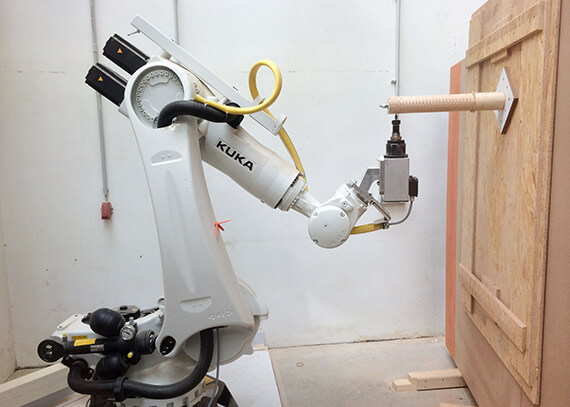
Industrial robots are fascinating architects, artists, and designers due to their complex kinematics and fluid, close to humanlike motion, but they are still not yet relevant tools in the design to production process. In the scope of this fundamental research we aim to investigate approaches that allow designers, artists, and architects to appropriate industrial robots as intuitive design tools.

Research Project / ROTATION BODY WITH PATTERN 2015 / 02
We investigate how architects and designers can virtually and physically interact with robots, allowing immediate relationship between design and motion as an output, and how the robots’ inherent multifunctionality can be applied in an arts-based context, especially in relation to wood. Similar to the multifunctional robots, wood is an especially diverse material that can perform a wide range of tasks and is available in various forms and sizes, from glue-laminated timber to wood polymers. We therefore consider industrial robots ideal machines for interacting with wood, as they are not limited to subtractive fabrication, but can bend, weave, glue, spray, etc.
As a cooperative effort of architects with a significant background in robotics, master carpenters with decades of experience with wood, mathematicians with elaborate knowledge of geometry, and practicing designers, this transdisciplinary project aims to investigate interfaces and robots as instruments for artists, designers and architects to play with the geometry of motion and to couple this multifaceted machine with the similarly diverse material wood. By considering fabrication and wood immanent constraints in a digital environment, virtual prototyping will liberate architects and designers in design and design evaluation.
Industrial robots are therefore researched in this project as a playful tool, not as a replacement for the artist´s arm or a production-machine. By seeing industrial robots as powerful and intuitive tool we aim to move creativity to new frontiers in wood geometry and craft, in tool collaborations and human-environment interactions that are far beyond file to factory.


Design Project / RANDOMIZED OBJECTS 2016 / 05
More selected projects
Autumn 2017
NEU/ZEUG
AT THE CREATIVE FAIRS OF UPPER AUSTRIA LINZ & STEYR (OÖ)
With our new Label NEUZEUG, we will be participating at the creative fairs of Upper Austria for the first time.
MAKER FAIRE | STEYR
KULTURVEREIN RÖDA
Friday, 29th September 2017, 2 to 8 PM
Saturday, 30th September 2017, 10 AM to 6 PM
Design Thinking Trial Workshop
on Saturday, 30th September
Sign up here – WEAR FAIR| LINZ
Tabakfabrik Linz
6th to 8th October 2017
More info here > www.wemakeit.com
10TH September bis 7TH October 2017
AUSTRIAN GLASS CORE
THE VENICE GLASS WEEK VENICE (IT)
Wir are pleased, that "Liquid Skin" will be exhibited within the "Austrian Glass Core" at the Venice Glass Week.
Tana Art Space / Brick
Castello, 2110
Venice
More info here > www.thevenice glassweek.at
DESIGN THINKING | IN ECHT!
IMPULS WORKSHOPS AUTUMN 2017
NEXT DATES
12TH OCTOBER 2017 | STEYR
19TH OCTOBER 2017 | WIEN
each from 6 to 8 PM
Understanding, observing, developing solutions, prototyping, testing! This is design thinking in brief.
In our 90 minute impulse workshop you will get to know the individual phases of design thinking quickly and succinctly with a practical example!
Target group: profit & non-profit organizations, company founders, executives, teaching, innovation & development
Interested? All Infos here or on facebook
NEW COOPERATION!
Handmade Essentials by
LUCY.D & NEUZEUGHAMMER
Vienna – Steyr – Siening
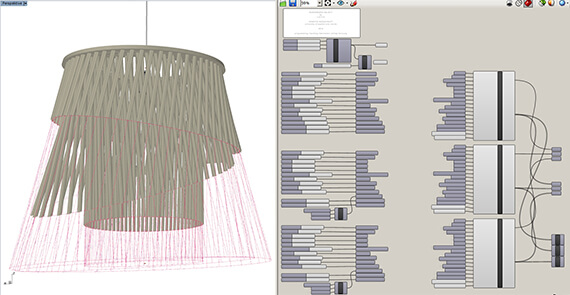
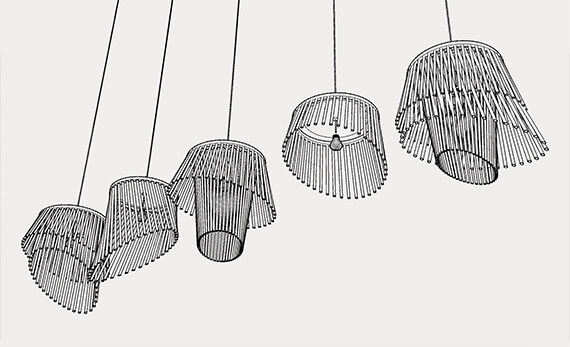
We are always looking for partners and producers, who provide a special quality to our projects. Together with the Porzellanmanufaktur Neuzeughammer in Sierning (Upper Austria) we design innovative lighting objects are made from hand-made porcelain.
We are pleased to present the results at this year's Vienna Design Week!
Soon there will be the first object to see - stay tuned;)
14TH June to 10TH September 2017
DESIGN MADE IN AUSTRIA | DESIGNFORUM | Vienna (AT)
We are happy to announce that our tea spoon "Tèo" will be shown at the exhibition "Design Made in Austria" at the Designforum Vienna next to many austrian design innovations.
More info here > www.designforum.at
04th to 25th April 2017
SaloneSatellite | 20 years of creativity
Fabbrica del Vapore, Milano (I)
SaloneSatellite has always been a great platform for young design talents all over the world. This year, it is celebrating its 20th anniversary and the event is dedicated to the question "DESIGN is ...?“ At the same time there will be a big exhibition "SALONESATELLITE. 20 Years of New Creativity " shown in April at the Fabbrica del Vapore in Milan. We are proud to present our projects "TÈO", "RYKER" and "LIQUID SKIN“ once more at the SaloneSatellite.
Mehr Info unter> www.salonemilano.it
15th to 18th March 2017
HANDWERK
Specialists Fair for Wood, Tools, Paint & Trade | Wels (AT)
We are happy to see our stool "Trio", being exhibited also at the Handwerk - Specialists Fair for Wood, Tools, Paint & Trade.
More info at > www.handwerk-wels.at
© Photo: Ars Electronica / Martin Hieslmair
9 February to 12 March 2017
CREATIVE ROBOTICS | ARS ELECTRONICA | Linz (AT)
"TRIO" is exhibited at the ARS ELECTRONICA Center in Linz!
Trio is a stool that was inspired by contemporary, architectural structures. It consists of three identical pieces, whose fabrication is optimized to balance manual and machinic labour. As the code is fully parametric, every chair can be very efficiently individualized. As an experimental piece, the stool aims to evaluate and demonstrate our considerations in regards to materials, dimensions, proportions, and tectonics. The result is a beautiful furniture object, whose efficient fabrication is only possible through the use of a robotic arm.
For more information go to> www.aec.at
6 October 2016 to 20 March 2017
AM ENDE: ARCHITEKTUR | Time travels 1959 to 2019
Center for Architecture Vienna (AT)
Opening: 5 October 2016, 7pm
Robotics found their way into architecture and creative industry. Robotic arms were developed as universal machines similar to the human hand, equipped with an array of tools. A change of tools transforms a milling robot within minutes into a 3D printer, a CNC drilling machine or a completely new yet unknown machine.
The research project “Robotic Woodcraft“ a cooperation between the University of Applied Arts, Vienna and the Association for Robots in Architecture and the design studio Lucy.D. research innovative practices in the woodworking industries. For this project, e.g., a monitor blind Monitorblende mounted on a robot is created. Such an object could not be produced at a reasonable cost with standard industry tools. The robotic installation interacts with the visitors and shows a curated selection of videos. The projects shown illustrate the way in which the use of robots can create novel approaches in architecture and design.
For more information go to> www.azw.at
3rd October to 15 January 2016
VIRIBUS UNITIS Re-Design10
HOFMOBILIENDEPOT | Vienna (AT)
VIENNA DESIGN WEEK 2016
Opening cocktail on 3rd October 2016, 7 pm
Within the framework of the 10th VIENNA DESIGN WEEK 2016 10 designers contrast their contemporary creations with the historic objects at Hofmobiliendepot. The exhibition is a joyous comparison of old with new and of tradition with vision, all set up by Walking Chair design studio.
For the first time we show pieces of our Working in New Ways WorkWiesner Hager new collection. The m.zone Canapé is an “island” for informal meetings in everyday business life contrasted with the imperial work life and work environment of empress Sissi. We want to break with old classic habits and ideals and show new, revolutionary visions of work life with this installation.
For more information go to > www.viennadesignweek.at
16 September to 2nd October 2016
AUSTRIAN DESIGN UPDATE | Tallinn (EE)
The »Austrian Design Update« exhibition in Tallinn offers an overview of the international contemporary and also the current product design scene tendencies. lso new contemporary Austrian design sector products are presented in addition to the award winning projects of the past years. The exhibition opens on September 17th 2016 and will be shown until the end of September in Taillin.
The exhibition will also be shown within the framework of the “Skopje Design Week” from 23rd to 27 November.
For more information > www.designaustria.at
20 to 22nd January 2016
LANDTMANN COLLECTION | WEDDING CAKES
Messe Trau Dich (Trau Dich trade fair) | Vienna (AT)
Fine patisserie Landtmann together with Jausenstation Schönbrunn present themselves and their newest products on the “Trau Dich” trade fair in January. Lucy.D designs five different wedding cake collections using the Landtmann Collection building blocks. The following collections suitable for weddings from 30 up to 130 persons are presented: Apricot Dreams, Lovely Stripes, Polka Dots, Blueberry Nights and White Nights. Three different cake toppings motifs (bridal couple, writing) made of wood top off the presentation.
www.landtmann-patisserie.at
www.landtmann-jausenstation.at
Go to project > LANDTMANN HOCHZEITSTORTEN
1st to 4 August 2016
SUMMERWORKSHOP at the farm
Sierning, Upper Austria (AT)
Light x2
In our workshop at the farm in Sierning our current topic is “light”. We are working on a lamp collection to be individually produced with a robot.
25 to 29 October 2016
ORGATEC | Köln (DE)
Arbeit Neu Denken
Office Furniture Trade Fair
We will show our newly designed office furniture collection for Wiesner Hager m.zone for the first time at the Orgatec 2016 in Köln, Germany.
For more information go to > www.orgatec.de
5 Juni 2016
VIENNA FOOD FESTIVAL | Rathaus Vienna,
Volkshalle (AT)
Presentation ‘Food & Design’ at 2 pm
from 3 pm Meet & Greet
Food & Eat Design.Food & Eat Design. Food is more than just nourishment. The term “Design” always implies the aspect of “Creative possibilities”. That is why we “form” products, culinary traditions, rooms designed for eating and food culture. We make food and the big picture of its different meanings a subject of discussion in innovative presentations and workshops.
Additional speakers: Kathrina Dankl / Fransisca Tan /
Klaus Dürrschmid / Barbara Räderscheidt
For more information go to > www.viennafoodfestival.info
2016
NEW CONCEPT FOR THE OPEN OFFICE I WIESNER HAGER
We are developing a new series of furniture for the open office, consisting of diverse working tables, sofa elements, paravents and displays.
It’s a concept of modular furniture which offers new possibilities to regulate distance and intimacy, private working and environmental influences in a very intuitive way.
This new furniture for the future office will be shown at the Orgatec in octobre 2016 for the first time.
For more info go to > www.orgatec.de
25 July 2016
KEYNOTE AT VÖSLAUER
WATER & CONTAINERS
Water object worlds
Bad Vöslau (AT)
In our keynote we show new approaches to the “water” topics and talk about the categories like “Rituals”. “On the road” and “Material”. We also cover drinking habits, mobility and consumption on the go as well as the use of new materials in artistic research.
April 2016
HOW TO CRACK NUTS – AN ANALYSIS
Nuts to be eaten can be cracked in many different ways. A nutshell in its form is a small architectonic wonder. It possesses its own inherent natural logic of the best way to crack it in the most efficient way. In our search for tools for utmost efficient nut cracking we went back as far as the stone age. Our new nut cracker will be based on this analysis. Stay tuned for more to come…
November 2015
NEW STUDIO
Laudongasse 9 | Wien (A)
We have moved! In addition to our workspace in Sierning, we now have a new studio at Laudongasse 9 in Vienna!
30 November 2015
JA! NATÜRLICH CHRISTMAS PARTY
Ich koche Studio | Vienna (AT)
We develop a gala evening for all Ja!Natürlich Christmas party guests by uniting culinary delights and design in an elegant way. Candles hanging from the ceiling seem to dance about, herbs expert and Gourmet chef Meinrad Neukirchner creates a festive menu tailored to the occasion. Guests enjoy delicacies from our platinum plated Ryker Collection plates.
25 September 2015 &
28 September – 2nd Oktober 2015
RANDOMIZED IDENTITIES | INSTALLATION
VIENNA DESIGN WEEK 2015
Assembly hall, University for Applied Arts, | Vienna (AT)
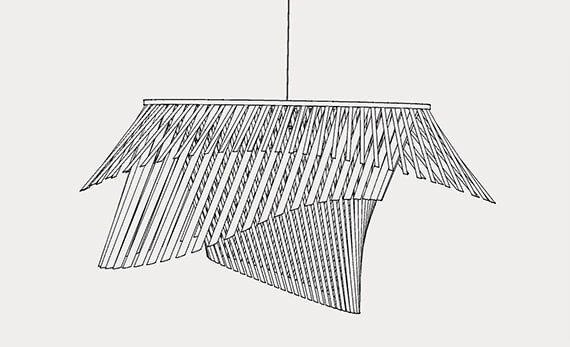
Lucy.D., as part of the interdisciplinary research team Robotic Woodcraft, developed the design concept for the University of Applied Arts contribution to the Vienna Design Week this year. An industrial robot produces randomized wooden structures in a daily live robotic performance. Minimal arbitrary changes in the computer data create new structures and forms within one series.
www.roboticwoodcraft.com
www.dieangewandte.com
LIVE ROBOTIC: daily from 6 pm to 8 pm (except Sat & Sun)
at the University of Applied Arts department Wood Technology (Holztechnologie), first basement.
COCKTAIL: 29 September ⁄ 6 pm
at the assembly hall oft he University for Applied Arts, Vienna with live projections by Bildwerk
14 September 2015
DUKE.D UND KIM.D I HATS
VIENNA PRODUCTS COLLECTION 2015
Presentation at the Museum of Art History I Rubenssaal
Vienna (AT)
First time presentation of our new hats Duke.D and Kim.D for the Mühlbauer hats manufacturer. For the Vienna Products COLLECTION 2015 we transformed the hat in its classic form into sensuous, light sculptures by crushing, folding them and using overlaying colors.
14 July 2015
MY TIME | INSTALLATION
RADO STAR PRIZE 2015
Rado Boutique, Kärntnerstrasse 18 | 1010 Vienna (AT)
We addressed the question whether it was possible for a subjective sense of time to manifest within an object.
“My time” consists of a wave-like structured wooden disk, rotating around its own axis while mounted on a delicate structure, a bit like a grandfather clock. The disk model especially created for the object “My Time” was milled by a six-axled industrial robot and crafted in the course of a research project Robotic WoodCraft at the University of Applied Arts, Vienna.The installation is exhibited from July 14 to 31st in Vienna, Kärntner Strasse 18.
Juli 2015
THE LANDTMANN COLLECTION
SHORTLIST VIENNA STATE PRIZE for DESIGN | Vienna (AT)
THE LANDTMANN COLLECTION is accepted into the shortlist of the Vienna State Prize for Design 2015 in the category product design / consumer goods. Award ceremony with the announcement of nominations and the award itself will take place Sept. 23 2015!
For more information go to > www.staatspreis-design.at
15 January 2015
WALLPAPER DESIGN AWARD 2015
Best Coffee and Cake London (GB)
Our cake collection for Café Landtmann was awarded the Wallpaper Design Award 2015 on January 15th 2015 in London.
For more information go to > www.wallpaper.com
Go to project > LANDTMANN KOLLEKTION
6. September – 10. October 2014
VIENNA DESIGN WEEK
CAFÉ LANDTMANN | VIENNA (AT)
26 September to 10 October 2014
The LANDTMANN COLLECTION is presented for the first time: cakes for various occasions like birthdays, weddings or company events. The idea is to purely enjoy the cakes´ delicious flavors and optics. Developed together with Landtmann‘s fine patisserie we gave the old classics like Esterhazy cake or Landtmann cake a thorough facelift. Clear design meets the high art of patisserie, so to speak. We definitely eliminated things like figurines made of marzipan and other confectioner´s embellishments. As their temporary stage the cakes were set up in the winter garden of the Landtmann coffee house.
28 May 2014
COMPASSO D’ORO AWARD CEREMONY
SPAZIO A| MILANO (AT)
The teaspoon TÈO for Alessi is awarded an “Honourable Mention“ of the Compasso d‘Oro 2014.
For more information go to > ADI DESIGN INDEX
Go to project > TÈO
27 to 28 September 2014
EXHIBITION AT THE KUNSTSALON in LINZ
DESIGNSALON | LINZ (AT)
For the first time Landesgalerie Linz organizes the Kunstsalon Linz. New is its emphasis on design, with a separate presentation in the hall of arms under the title “Designsalon“. Two of our projects are part of the exhibition of current Austrian design compositions: the conference chair Pulse for Wiesner Hager and the teaspoon Tèo for Alessi. Curator: Katrin Steindl
For more info go to > www.landesmuseum.at
24 September 2013
NOMINATION FOR THE AUSTRIAN STATE AWARD for DESIGN 2013
VIENNA (AT)
24 September 2013
The teaspoon Tèo is nominated for the Austrian State Award for Design 2013 in the category product design and consumer goods.
Go to project > TÈO
24 June to 3 July 2013
WHAT’S FOR BREAKFAST? | EXHIBITION
WRITERS HOUSE OF GEORGIA | TIFLIS (GEO)
24 June to 3 July 2013
In addition to LUCY.D´s teaspoon Tèo products by Josef Hoffmann, Robert Stadler, Thomas Feichtner, mischer’traxler, Polka, Alexander Gufler, dottings, aws Designteam and Kim&Heep are on display.
Go to project > TÈO